[CoRL25] CLONE: Closed-Loop Whole-Body Humanoid Teleoperation for Long-Horizon Tasks
Abstract
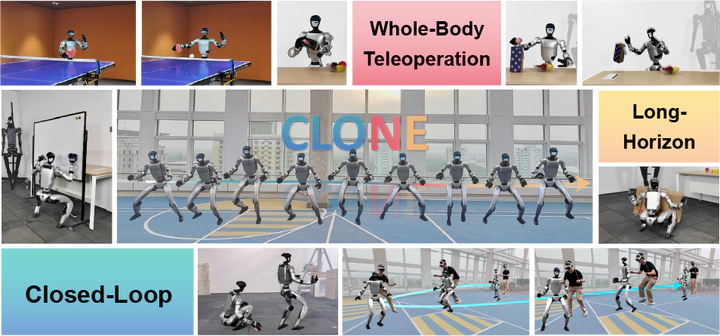
Humanoid robot teleoperation plays a vital role in demonstrating and collecting data for complex interactions. Current methods suffer from two key limitations: (1) restricted controllability due to decoupled upper- and lower-body control, and (2) severe drift caused by open-loop execution. These issues prevent humanoid robots from performing coordinated whole-body motions required for long-horizon loco-manipulation tasks. We introduce CLONE, a whole-body teleoperation system that overcomes these challenges through three key contributions: (1) a Mixture-of-Experts (MoE) whole-body control policy that enables complex coordinated movements, such as “picking up an object from the ground” and “placing it in a distant bin”; (2) a closed-loop error correction mechanism using LiDAR odometry, reducing translational drift to 12cm over 8.9-meter trajectories; and (3) a systematic data augmentation strategy that ensures robust performance under diverse, previously unseen operator poses. In extensive experiments, CLONE demonstrates robust performance across diverse scenarios while maintaining stable whole-body control. These capabilities significantly advance humanoid robotics by enabling the collection of long-horizon interaction data and establishing a foundation for more sophisticated humanoid-environment interaction in both research and practical applications.
Yutang Lin
Tong Class '23
I’m an undergraduate student at Yuanpei College, Peking University, pursuing a Bachelor’s degree in Computer Science. My research interests include computer vision, robotics, and machine learning.