[IROS17] Feeling the Force: Integrating Force and Pose for Fluent Discovery through Imitation Learning to Open Medicine Bottles
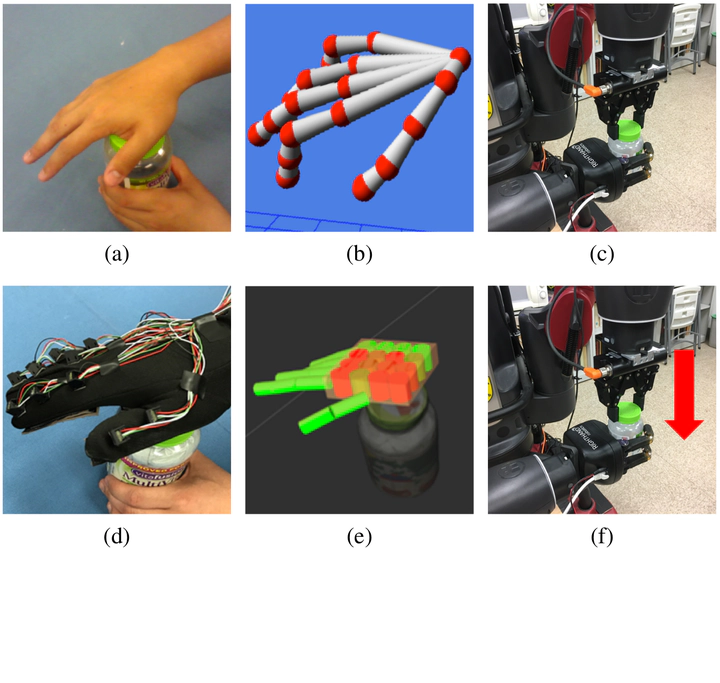 Given a RGB-D-based image sequence (a), although we can infer the skeleton of hand using vision-based methods (b), such knowledge cannot be easily transferred to a robot to open a medicine bottle (c ), due to the lack of force sensing during human demonstrations. In this work, we utilize a tactile glove (d) and reconstruct both forces and poses from human demonstrations (e), enabling robot to directly observe forces used in demonstrations so that the robot can successfully open a medicine bottle (f).
Given a RGB-D-based image sequence (a), although we can infer the skeleton of hand using vision-based methods (b), such knowledge cannot be easily transferred to a robot to open a medicine bottle (c ), due to the lack of force sensing during human demonstrations. In this work, we utilize a tactile glove (d) and reconstruct both forces and poses from human demonstrations (e), enabling robot to directly observe forces used in demonstrations so that the robot can successfully open a medicine bottle (f).Abstract
Learning complex robot manipulation policies for real-world objects is challenging, often requiring significant tuning within controlled environments. In this paper, we learn a manipulation model to execute tasks with multiple stages and variable structure, which typically are not suitable for most robot manipulation approaches. The model is learned from human demonstration using a tactile glove that measures both hand pose and contact forces. The tactile glove enables observation of visually latent changes in the scene, specifically the forces imposed to unlock the child-safety mechanisms of medicine bottles. From these observations, we learn an action planner through both a top-down stochastic grammar model (And-Or graph) to represent the compositional nature of the task sequence and a bottom-up discriminative model from the observed poses and forces. These two terms are combined during planning to select the next optimal action. We present a method for transferring this human-specific knowledge onto a robot platform and demonstrate that the robot can perform successful manipulations of unseen objects with similar task structure.