[IJCV18] Configurable 3D Scene Synthesis and 2D Image Rendering with Per-Pixel Ground Truth using Stochastic Grammars
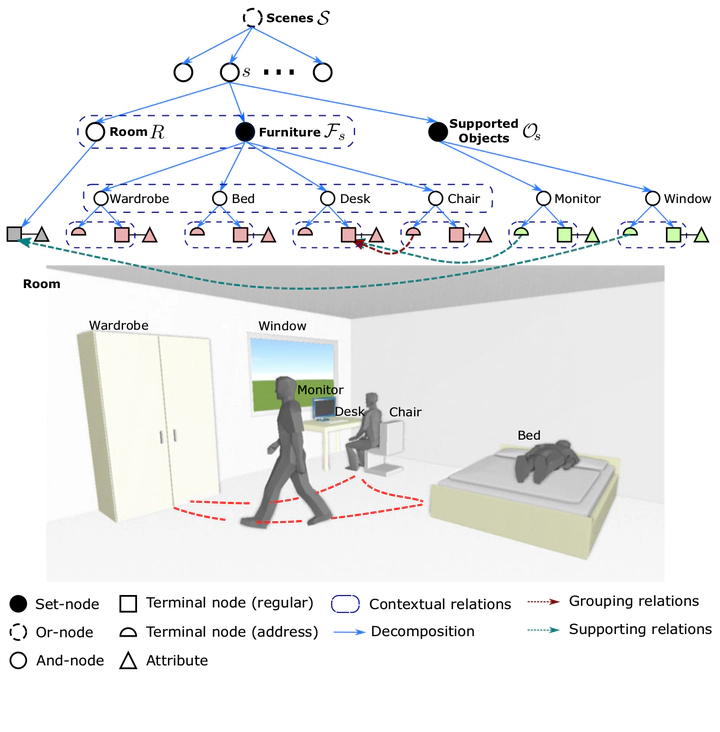 A simplified example of a parse graph of a bedroom. The terminal nodes of the parse graph form an MRF in the bottom layer. Cliques are formed by the contextual relations projected to the bottom layer
A simplified example of a parse graph of a bedroom. The terminal nodes of the parse graph form an MRF in the bottom layer. Cliques are formed by the contextual relations projected to the bottom layerAbstract
We propose a systematic learning-based approach to the generation of massive quantities of synthetic 3D scenes and arbitrary numbers of photorealistic 2D images thereof, with associated ground truth information, for the purposes of training, benchmarking, and diagnosing learning-based computer vision and robotics algorithms. In particular, we devise a learning-based pipeline of algorithms capable of automatically generating and rendering a potentially infinite variety of indoor scenes by using a stochastic grammar, represented as an attributed Spatial And-Or Graph, in conjunction with state-of-the-art physics-based rendering. Our pipeline is capable of synthesizing scene layouts with high diversity, and it is configurable inasmuch as it enables the precise customization and control of important attributes of the generated scenes. It renders photorealistic RGB images of the generated scenes while automatically synthesizing detailed, per-pixel ground truth data, including visible surface depth and normal, object identity, and material information (detailed to object parts), as well as environments (e.g., illuminations and camera viewpoints). We demonstrate the value of our synthesized dataset, by improving performance in certain machine-learning-based scene understanding tasks–depth and surface normal prediction, semantic segmentation, reconstruction, etc.–and by providing benchmarks for and diagnostics of trained models by modifying object attributes and scene properties in a controllable manner.