[RA-L24] MiniTac: An Ultra-Compact 8 mm Vision-Based Tactile Sensor for Enhanced Palpation in Robot-Assisted Minimally Invasive Surgery
Abstract
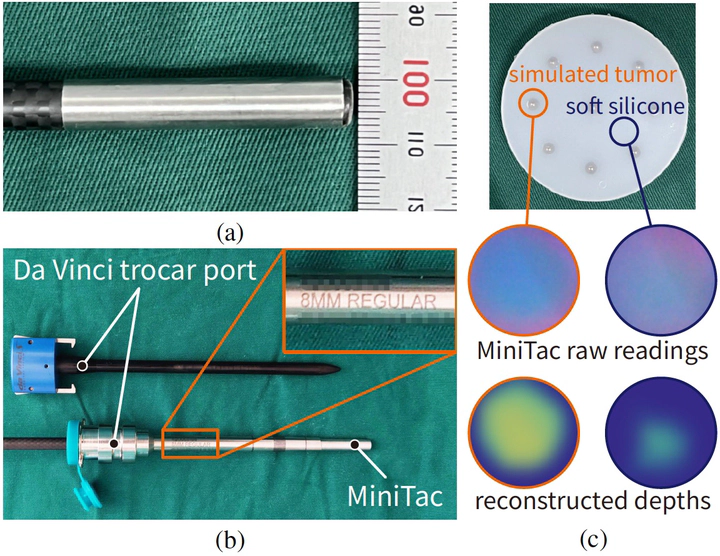
Robot-assisted minimally invasive surgery (RAMIS) provides substantial benefits over traditional open and laparoscopic methods. However, a significant limitation of RAMIS is the surgeon’s inability to palpate tissues, a crucial technique for examining tissue properties and detecting abnormalities, restricting the widespread adoption of RAMIS. To overcome this obstacle, we introduce MiniTac, a novel vision-based tactile sensor with an ultra-compact cross-sectional diameter of 8mm, designed for seamless integration into mainstream RAMIS devices, particularly the Da Vinci surgical systems. MiniTac features a novel mechanoresponsive photonic elastomer membrane that changes color distribution under varying contact pressures. This color change is captured by an embedded miniature camera, allowing MiniTac to detect tumors both on the tissue surface and in deeper layers typically obscured from endoscopic view. MiniTac’s efficacy has been rigorously tested on both phantoms and ex-vivo tissues. By leveraging advanced mechanoresponsive photonic materials, MiniTac represents a significant advancement in integrating tactile sensing into RAMIS, potentially expanding its applicability to a wider array of clinical scenarios that currently rely on traditional surgical approaches.
Zihang Zhao
Ph.D. '22
My research interests include robotics, mechatronics, and tactility-related robot cognition, etc.
Leiyao Cui
Ph.D. '24, co-advised with Prof. Zhi Han
My research interests include scene understanding, robotics, etc.