[NeurIPS25] Taccel: Scaling Up Vision-based Tactile Robotics via High-performance GPU Simulation
Abstract
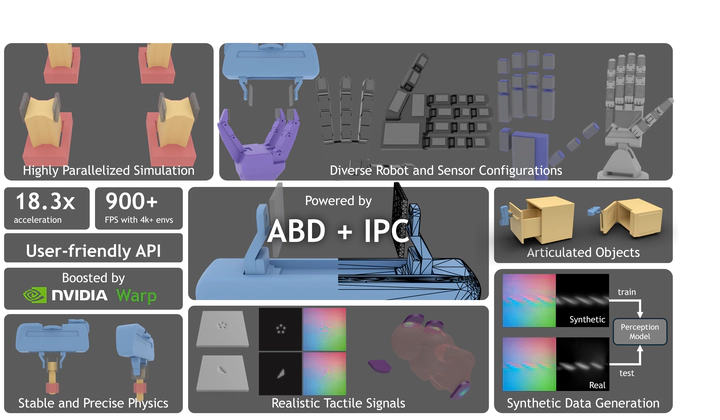
Tactile sensing is crucial for achieving human-level robotic capabilities in manipulation tasks. As a promising solution, Vision-Based Tactile Sensors (VBTSs) offer high spatial resolution and cost-effectiveness, but present unique challenges in robotics for their complex physical characteristics and visual signal processing requirements. The lack of efficient and accurate simulation tools for VBTSs has significantly limited the scale and scope of tactile robotics research. We present Taccel, a high-performance simulation platform that integrates Incremental Potential Contact (IPC) and Affine Body Dynamics (ABD) to model robots, tactile sensors, and objects with both accuracy and unprecedented speed, achieving a total of 915 FPS with 4096 parallel environments. Unlike previous simulators that operate at sub-real-time speeds with limited parallelization, Taccel provides precise physics simulation and realistic tactile signals while supporting flexible robot-sensor configurations through user-friendly APIs. Through extensive validation in object recognition, robotic grasping, and articulated object manipulation, we demonstrate precise simulation and successful sim-to-real transfer. These capabilities position Taccel as a powerful tool for scaling up tactile robotics research and development, potentially transforming how robots interact with and understand their physical environment.

Yuyang Li
Ph.D. '24
My research interests lie in the intersection of 3D computer vision, computer graphics, and robotics. My long-term goal is to create intelligence that perceives, understands, and interacts with the physical / virtual environments.
Zihang Zhao
Ph.D. '22
My research interests include robotics, mechatronics, and tactility-related robot cognition, etc.