[T-RO25] Integration of Robot and Scene Kinematics for Sequential Mobile Manipulation Planning
Abstract
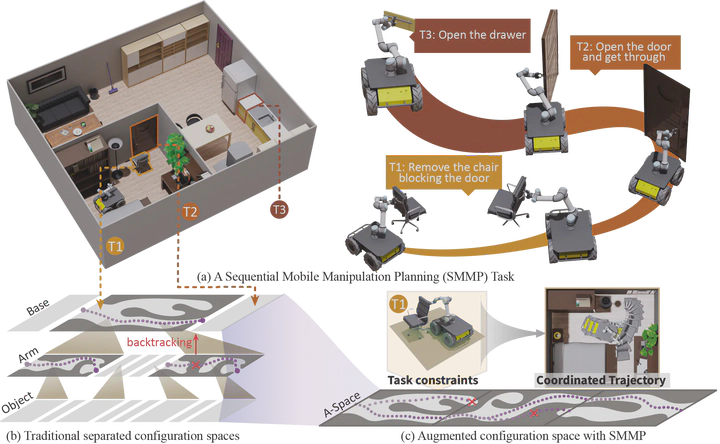
We present a Sequential Mobile Manipulation Planning (SMMP) framework that can solve long-horizon multi-step mobile manipulation tasks with coordinated whole-body motion, even when interacting with articulated objects. By abstracting environmental structures as kinematic models and integrating them with the robot’s kinematics, we construct an Augmented Configuration Apace (A-Space) that unifies the previously separate task constraints for navigation and manipulation, while accounting for the joint reachability of the robot base, arm, and manipulated objects. This integration facilitates efficient planning within a tri-level framework: a task planner generates symbolic action sequences to model the evolution of A-Space, an optimization-based motion planner computes continuous trajectories within A-Space to achieve desired configurations for both the robot and scene elements, and an intermediate plan refinement stage selects action goals that ensure long-horizon feasibility. Our simulation studies first confirm that planning in A-Space achieves an 84.6% higher task success rate compared to baseline methods. Validation on real robotic systems demonstrates fluid mobile manipulation involving (i) seven types of rigid and articulated objects across 17 distinct contexts, and (ii) long-horizon tasks of up to 14 sequential steps. Our results highlight the significance of modeling scene kinematics into planning entities, rather than encoding task-specific constraints, offering a scalable and generalizable approach to complex robotic manipulation.