[IROS23] Sequential Manipulation Planning for Over-actuated Unmanned Aerial Manipulators
Abstract
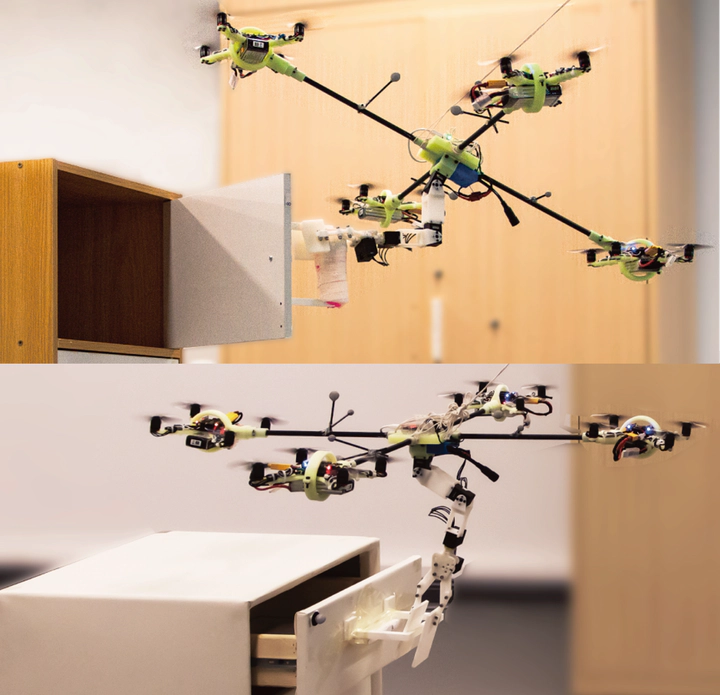
We investigate the sequential manipulation planning problem for unmanned aerial manipulators (UAMs). Unlike prior work that primarily focuses on one-step manipulation tasks, sequential manipulations require coordinated motions of a UAM’s floating base, the manipulator, and the object being manipulated, entailing a unified kinematics and dynamics model for motion planning under designated constraints. By leveraging a virtual kinematic chain (VKC)-based motion planning framework that consolidates components’ kinematics into one chain, the sequential manipulation task of a UAM can be planned as a whole, yielding more coordinated motions. Integrating the kinematics and dynamics models with a hierarchical control framework, we demonstrate, for the first time, an over-actuated UAM achieves a series of new sequential manipulation capabilities in both simulation and experiment.